人間ロボット交流実験のセンサデータ
データベースとデータベースの説明がほぼ英語になっています。しかし、この実験には日本人が参加してくれて、日本語版のアンケートもあります。この研究の目標を理解するには、2番目の実験の日本語出版物をご覧ください。
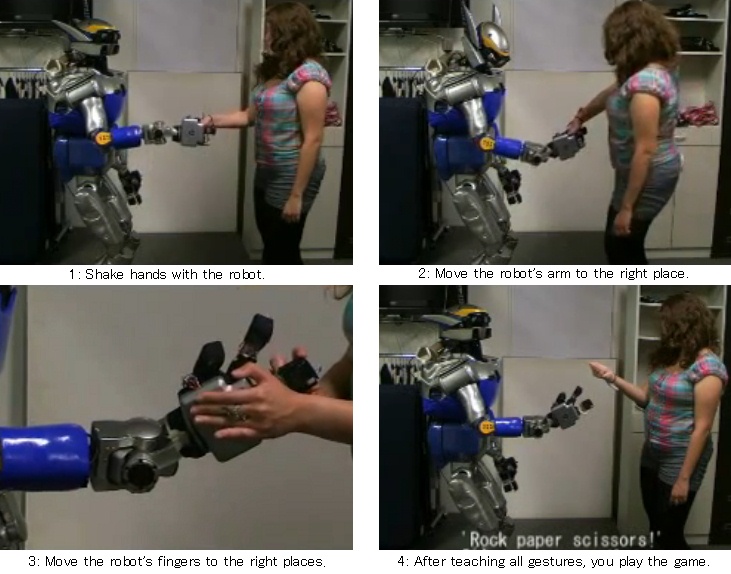
This project focused on using sensors on a humanoid robot to sense information about a user during an interaction. We found that several measures that can be taken by robot sensors (e.g., tactile, temperature) are highly correlated with several behavioral measures and subjective feelings about the robot. These results indicate that multimodal user sensing during human-robot interaction may be useful and fast measures that could help to improve the quality of the interaction.
This page contains sensor and survey datasets from three different experiments that have been made publicly available. Feel free to use these data upon citation of the article.
All documents are ZIP folders containing a text readme and relevant data in common Microsoft Office formats.